ПНИПУ, системы управления электроприводом (курсовой проект)
| 08.11.2025, 20:09 | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
ЗАДАНИЯ НА КУРСОВОЙ ПРОЕКТ Исходные данные на выполнение курсового проекта представлены в таблице. Номер задания (вариант) определяет преподаватель Таблица 2.1 Исходные данные
Продолжение таблица 2.1
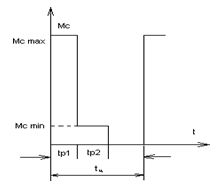
Примечание: Вид движения В – вращательное, П – поступательное При расчете мощности электродвигателя принять наиболее неблагоприятный режим работы. Разработать электропривод следящей системы, обеспечивающей заданную точность слежения механизма при максимальной скорости задающего сигнал и максимальном моменте сопротивления. Датчики положения механизма выбрать, исходя их требуемой точности. В расчетах принять КПД редуктора равным 40 % для червячной передачи. По исходным данным, приведенным в таблице 2.1, необходимо: 1) выбрать тип и рассчитать требуемую мощность электродвигателя с учетом переходных процессов при пуске, торможении и изменении режимов работы двигателя; 2) в соответствии с исходными данными (мощностью, диапазоном регулирования скорости и другими параметрами) выбрать тип преобразователя [4, 5]; 3) разработать принципиальную схему силовой части электропривода; 4) по техническим характеристикам комплектующих электропривода [см. табл. П1 – П4] и принципиальной схеме, рассчитать передаточные функции всех элементов электропривода (электродвигателя, преобразователя и т.д.) и составить его структурную схему; 5) исследовать устойчивость и качество переходных процессов. Электропривод должен обеспечить плавное регулирование скорости механизма. Статистическая погрешность поддержания заданной скорости при изменении момента сопротивления заданном диапазоне не должна превышать заданной скорости во всем диапазоне регулирования. Режим работы механизма – повторно-кратковременный. Расчет мощности двигателя произвести при его работе с максимальным коэффициентом относительной продолжительности включения (εmax) и минимальном времени цикла tц min. Относительная продолжительность включения определяется по выражению (рис.1.1).
Рисунок 1.1
где tp1 – время работы при Мс = Мс max; tp2 – время работы при Mc = Mc min; В нереверсивных приводах должно быть предусмотрено динамическое торможение. Исследование качества переходного процесса произвести при ступенчатом изменении управляющего воздействия задания скорости (0 … 1) ωн при подаче на вход номинального напряжения задания – 10 В. ПОРЯДОК РАБОТЫ НАД ПРОЕКТОМ 1. Произвести анализ исходных данных и разработать функциональную схему системы автоматического регулирования (САР). 2. Выбрать тип электропривода и рассчитать мощность электродвигателя. 3. Разработать принципиальную схему силовой части электродвигателя. 4. Разработать структурную схему. 5. Произвести расчет и построить статические характеристики отдельных регуляторов и всей САР в целом. 6. Произвести анализ устойчивости некорректированной САР. Произвести синтез САР с заданными показателями качества методом подчиненного регулирования [16, стр. 17 20]. 7. Рассчитать и дать анализ вида переходного процесса. 8. Разработать релейно-контакторную схему подключения САР к промышленной сети, произвести расчет ее элементов. РЕКОМЕНДАЦИИ ПО СОДЕРЖАНИЮ И ОФОРМЛЕНИЮ КУРСОВОГО ПРОЕКТА Объем курсового проекта (без списка использованных источников и приложений) должен составлять 25-35 страниц. Титульный лист курсового проекта приведён в приложении А. Текст должен оформляться на компьютере, размер шрифта не более 14 пт, но не менее 12 пт, Times New Roman, межстрочный полуторный интервал, или рукописным способом черной или синей пастой. Страницы должны иметь поля, мм: 30 левое; 10 правое; 20 -верхнее; 20 нижнее. Текст должен выравниваться по ширине. В тексте должны быть расставлены переносы. Пояснительная записка должна быть выполнена на бумаге формата А4 по ГОСТ 7.32-2001 (графики и схемы можно выполнять на формате А4). В пояснительной записке отражаются: - все проведённые расчеты; - принципиальные и структурные схемы электропривода, выполненные в соответствии с требованиями ЕСКД; - обоснование выбора того или иного типа преобразователя, электродвигателя и т.д.; - графики переходных процессов; - список использованных источников. Приложение Б. Технические характеристики элементов электропривода Таблица П1. Технические характеристики двигателей постоянного тока
Таблица П2. Технические характеристики тиристорного преобразователя
Таблица П3. Технические характеристики трансформаторов
Таблица П4. Технические характеристики тахогенераторов
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||